非线性计算中的增量步与迭代方法
参考文献:
M.A.Crisfield, Non-linear Finite Element Analysis of Solids and Structures.
算例简述
本算例是希望通过一个简单的一维系统,给出非线性计算过程中增量步的概念,这是线性与非线性有限元计算之间一个很大的区别。
我们准备分析的系统如图所示

几何以及材料参数设置如下:
1 | L = 2500; % initial truss length |
系统 位移-外载 关系的解析求解
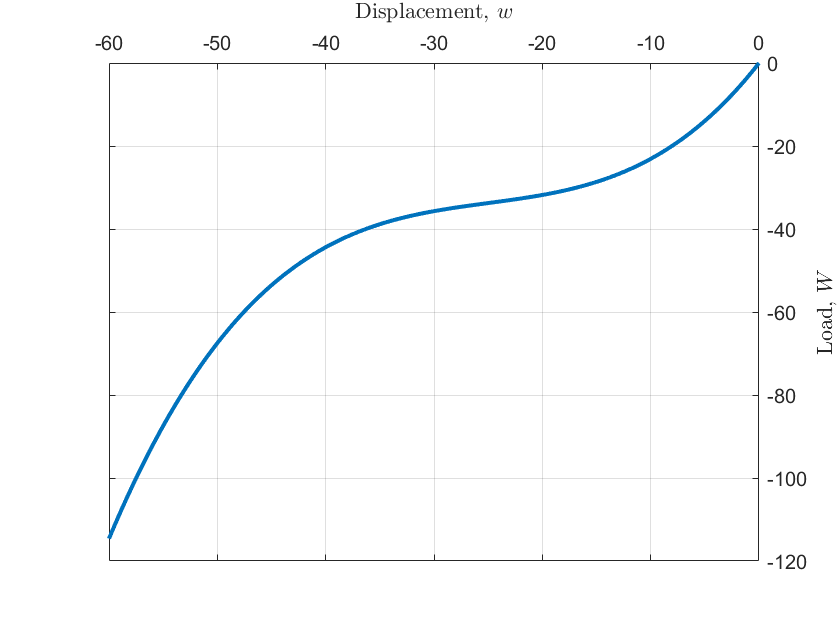
该系统外载 \(W\) 与位移 \(w\) 之间的解析关系是可以得到的,接下来我们将推导这一关系,并用它来衡量之后数值算法的准确性。
杆原长为 \(L\),变形后杆长度 \(l\) 为: \[ l=\sqrt{(z+w)^2 +d^2 } \] 杆的变形量 \(\Delta l\) 为 \[ \Delta l \triangleq l-L=\sqrt{(z+w)^2 +d^2 }-L \] 在我们的符号约定下,\(\Delta l\) 正值表示拉伸,负值表示压缩。根据定义,杆的应变为 \[ \varepsilon \triangleq \frac{\Delta l}{L} =\frac{\sqrt{(z+w)^2 +d^2 }-L}{L} =\sqrt{ {\left( \frac{w}{L} \right)}^2 +2\left( \frac{zw}{L^2 } \right)+1 } - 1 \] 若假设 \[ L\gg z, L \gg w \tag{1} \] 那么有如下近似关系: \[ \varepsilon \approx \frac{z}{L^2}w+\frac{1}{2L^2}w^2 \]
根据受力示意图,系统内力 \(N\) 和 \(P\) 与外载 \(W\) 之间的平衡关系为: \[ W = N \sin\theta + P \tag{2} \] 又因为假设的小量关系(1),所以 \(l \approx L\),因此 \(\sin \theta\) 可以近似表示为 \[ \sin \theta = \frac{z+w}{l} \approx \frac{z+w}{L} \tag{3} \] 杆材料的本构关系将应变 \(\varepsilon\) 与杆的内力 \(N\) 联系起来: \[ N=EA\varepsilon =EA\left( \frac{z}{L^2}w+\frac{1}{2L^2}w^2 \right) \tag{4} \] 根据弹簧的本构关系,弹簧力 \(P\) 为 \[ P=K_{\mathrm{s}} w \tag{5} \] 将式(3)(4)(5) 代入到式(2) 中,可以得到外载 \(W\) 与位移 \(w\) 的关系为 \[ W = EA\left( \frac{zw}{L^2}+\frac{1}{2}{ \left(\frac{w}{L}\right)}^2 \right) \frac{w+z}{L}+K_{ \mathrm{s} } w = \frac{EA}{L^3 }\left(z^2 w+\frac{3}{2}zw^2 +\frac{1}{2}w^3 \right)+K_{ \mathrm{s} } w \tag{6} \] 可以看到,外载与位移之间的关系是非线性的,可以用 MATLAB 作出位移-外载关系曲线的解析解:
系统 位移-外载 关系的数值求解
接下来,我们将使用 增量步 + 牛顿迭代法 来求解 位移-外载 曲线。
增量步方法
在陈述增量步方法之前,还是需要再强调一下线性问题与非线性问题之间的区别。对于线性问题,位移-外载曲线总是一条直线。因此,求解一次系统方程得到 \((w_0 ,W_0 )\),就能够知道系统在任意外载 \(W\) 下的位移响应 \(w\):
\[ w=\frac{w_0 }{W_0 }W \]
但在本例中,位移-外载曲线并不是直线,因此不可能像线性问题一样,让外载「一步到位」,直接得到最终的加载结果。不过,我们可以将整个加载过程分成多个增量步,在增量步足够小的时候,系统的响应是可以近似 「线性」的。
我们将加载过程分成 \(N\) 步,每一步的增量为 \(\Delta W_n\)。为了方便陈述系统在每一个加载点的状态,引入「加载时间」\(t\),它与增量步之间的关系可以用下面的数轴来描述:

加载时间 \(t\) 并不等同于真实的物理时间。
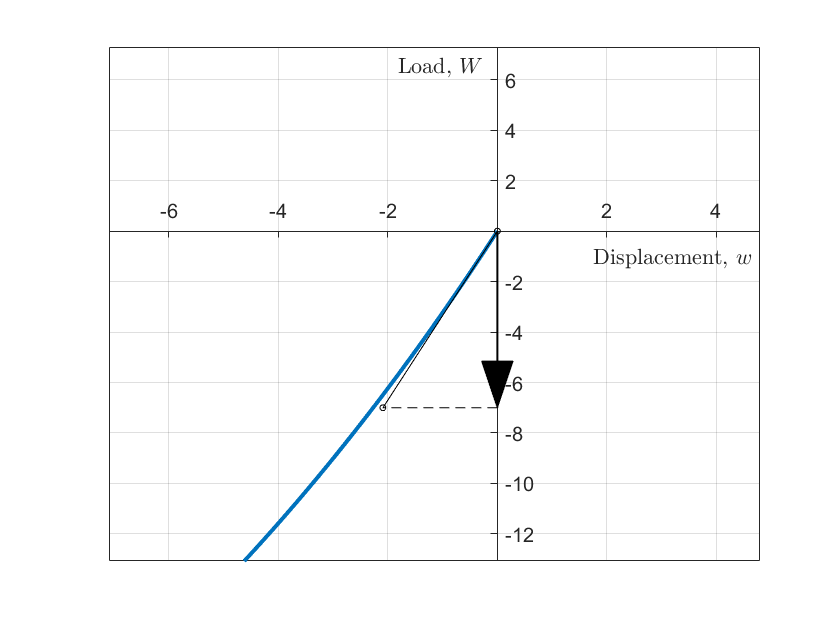
在该增量步下,如果使用显式方法计算(\(t_{n+1}\) 时刻的未知量可全部由 \(t_{n}\) 时刻的已知量计算得到),位移增量 \(\Delta w_{n+1}\) 为 \[ \Delta w_{n+1}:={\left( \left. \frac{\mathrm{d}W}{\mathrm{d}w} \right|_{t_{n}} \right)}^{-1} \Delta W_{n+1}=K_{n}^{-1} \Delta W_{n+1} \tag{7} \]
式中,\(K_{n}\) 为外载 \(W\) 对位移 \(w\) 在 \(t_{n}\) 时刻的导数:
\[ K_{n} \triangleq \left. \frac{\mathrm{d} W}{\mathrm{d} w} \right|_{t_n} =\frac{EA}{L}{\left(\frac{z}{L}\right)}^2 +\frac{EA}{L}\left(\frac{2zw_n + w_n^2 }{L^2 }\right)+\frac{N}{L}+K_{\mathrm{s}} \]
式中,\(w_n = \sum_{k=1}^{n} \Delta w_{k}\),\(n=0\) 时 \(w_n=0\)。对于第一次的增量步,位移 \(w_0 = 0\),杆中的内力 \(N_0=0\),由此计算得到点 \((0,0)\) 处的 \(K_{n}\) 为
1 | K = 3.3500 |
下一步的位移增量 \(\Delta w_1\) 为
1 | dw = -2.0896 |
多个增量步累积计算的结果为
需要指出的是,只使用显式增量步方法得到的结果,系统内力与外载并不是平衡的。例如在第一个增量步时,外载增量 \(\Delta W_1 = -7\),对应位移增量为 \(\Delta w_1\) 为
1 | dw = -2.0896 |
代入式(4)中内力的计算公式,并在外载方向投影,得到杆内力与弹簧力之和为
1 | f_ext = -6.4908 |
由此可见系统的内力与外载并不相等: \[ -7=f^{\mathrm{ext}} \neq f^{\mathrm{int}} = -6.4908 \]
迭代法求解
我们已经看到,如果只使用显式增量步计算,系统内外力并不是平衡的。系统内外力的差值可以定义为如下残差函数 \(g(w)\) :
\[ g(w) \triangleq \frac{EA}{L^3 }\left(z^2 w+\frac{3}{2}zw^2 +\frac{1}{2}w^3 \right)+K_{\mathrm{s}} w-W \]
对给定的外载 \(W\),真实位移应使得残差函数 \(g(w) \equiv 0\)。在增量步计算过程中,即使在 \(t_n\) 时刻可以保证系统内外力平衡,由于对系统在 \(\Delta W_{n+1}\) 增量步的线性假设,在 \(t_{n+1}\) 时刻的系统内外力一般并不平衡: \[ g(w_{n+1}^{(0)}) \neq 0 \] 式中,\(w_{n+1}^{(0)}\) 表示直接通过式(7)得到的结果。我们可以将 \(w_{n+1}^{(0)}\) 作为 Newton 迭代法的初值,迭代得到更好的位移增量 \(w_{n+1}^{(i+1)}\): \[ \Delta w_{n+1}^{(i+1)} := -\left( \left. \frac{\mathrm{d}g}{\mathrm{d}w} \right|_{w_{n+1}^{(i)}} \right)^{-1} g( w_{n+1}^{(i)}), \quad w_{n+1}^{(i+1)} = w_{n+1}^{(i)} + \Delta w_{n+1}^{(i+1)} \tag{8} \]
我们可以通过如下公式衡量迭代算法的收敛速度。如果方程在前后两次迭代步的残差满足 \[ \frac{|g( w_{n+1}^{(i+1)})|}{|g( w_{n+1}^{(i)})|^M} \approx \text{Const} \] 那么该迭代算法收敛速度是 \(M\) 阶的。也就是说,每次迭代的残差与前一次迭代的 \(M\) 次方在量级上保持一致。例如在本问题中,收敛残差比值打印出的结果为
1 | The error convergence of e_{i+1}/e_{i}^2 is 0.009203 |
所以算法(8)是平方收敛的(最后一步是因为达到了计算机浮点数精度)。这个算法的收敛速度是很快的,例如当初值残差是
E-01 量级的,而计算机浮点数精度为
E-16。那么对于平方收敛算法,只需要迭代 \[
\left( \left( \left( \left( \square^{-1} \right)^2 \right)^2 \right)^2
\right)^2 = \square^{-16}
\] 4
次就可以收敛到浮点数的精度!但是,需要指出的是,算法(8)的每一次迭代过程中,都需要重新计算
\(\left( \left.
\frac{\mathrm{d}g}{\mathrm{d}w} \right|_{w_{n+1}^{(i)}}
\right)^{-1}\),所以才能达到
平方阶的收敛速度。在本算例中可能无法体现出计算切线刚度矩阵的难度(本例切线刚度矩阵为标量),但对于更复杂的非线性系统,计算切线刚度矩阵是非常消耗时间的。
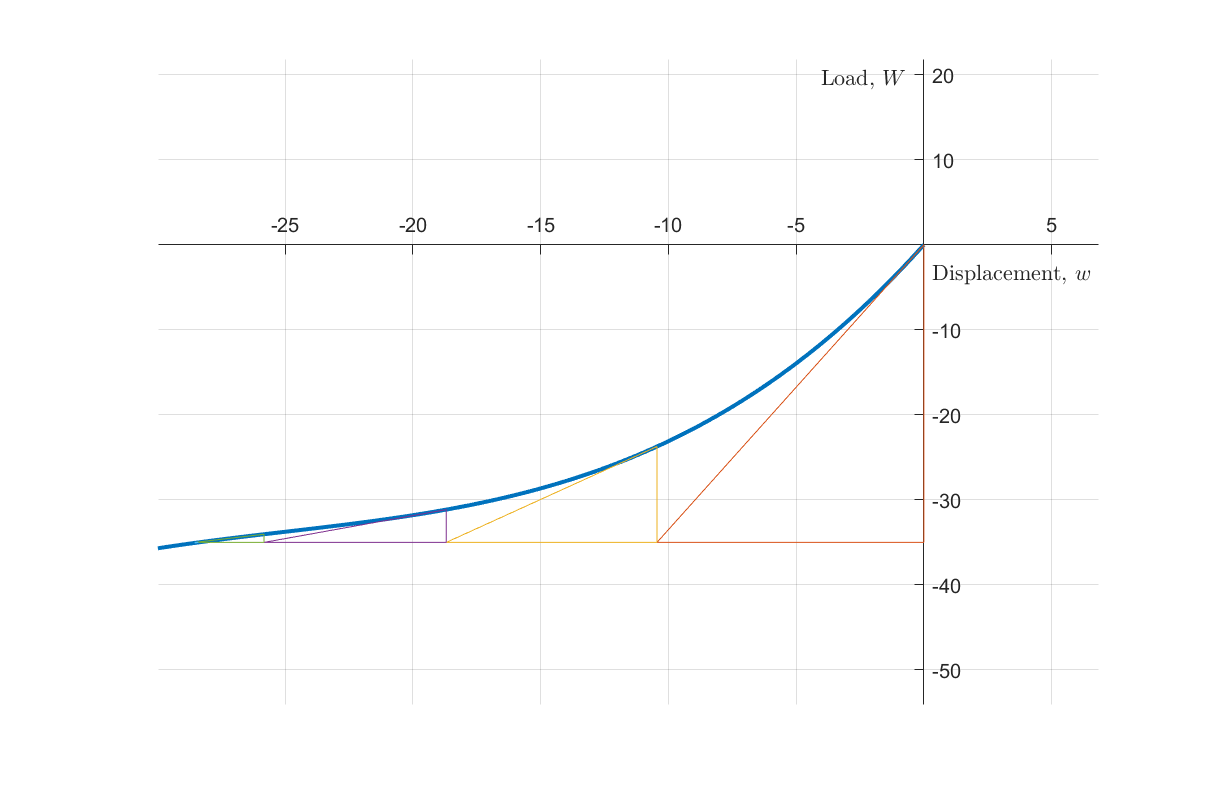
不过,保证收敛的迭代算法并不是唯一的。我们可以放松对收敛速度的要求,降低计算切线刚度矩阵的难度。一种方法是,在计算得到第一次迭代时计算得到的切线刚度矩阵后,将它作为后续迭代中刚度矩阵的近似: \[ \Delta w_{n+1}^{(i+1)} = -\left( \left. \frac{\mathrm{d}g}{\mathrm{d}w} \right|_{ w_{n+1}^\textcolor{red}{(0)} } \right)^{-1} g( w_{n+1}^{(i)}), \quad w_{n+1}^{(i+1)} = w_{n+1}^{(i)} + \Delta w_{n+1}^{(i+1)} \tag{9} \] 算法(9)的收敛速度没有算法(8)速度那么快。例如算例在使用算法(9)时的一个加载步的迭代过程为:
1 | Current load step: 1 |
算法(8)和(9)在每一个加载步的迭代过程可以用下图清晰地表示出来:
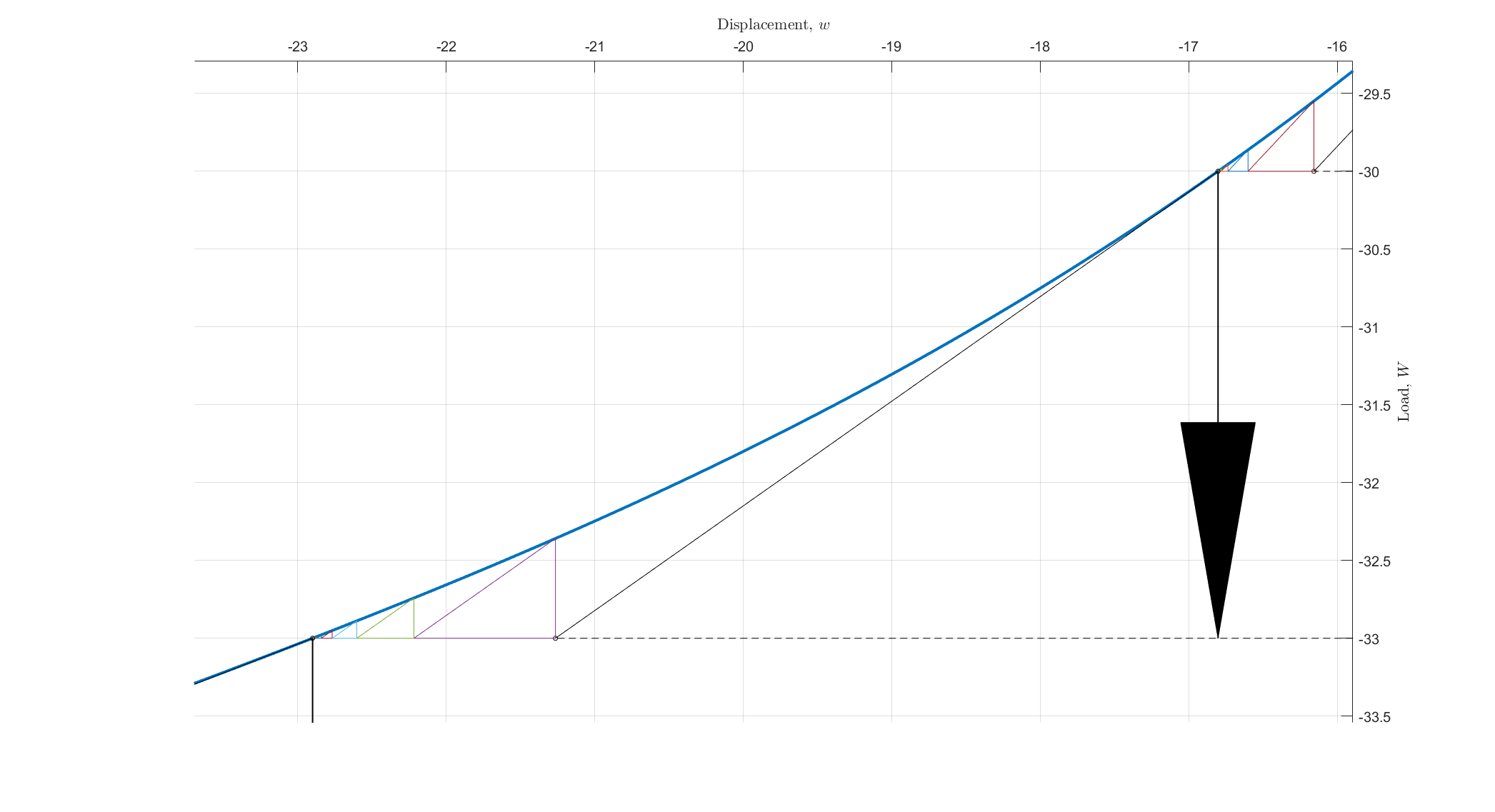
切线刚度矩阵可以使用近似值,这会影响迭代收敛的速度,但一般不会影响迭代收敛到准确值的精度。但是,残差 \(g( w_{n+1}^{(i)})\) 的计算结果必须是准确的。如果系统的内力与外力计算误差太大,那么无论怎样提高切线刚度矩阵的精度,或者增加迭代的次数,或者减小增量步的步长,都不会得到正确的计算结果!
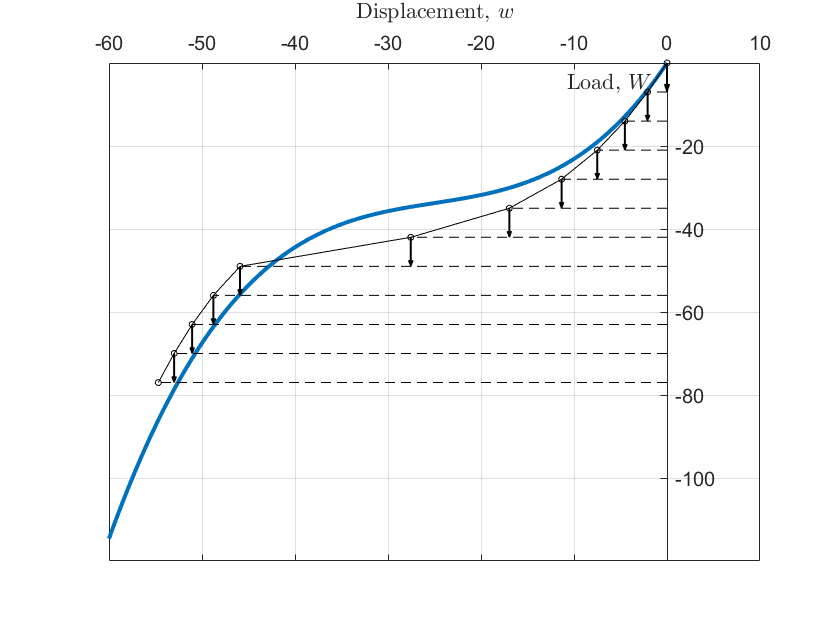
最终,我们给出在使用增量步,并对每一个增量步的结果进行 Newton 迭代,使得内力等于外载后得到的数值计算结果:
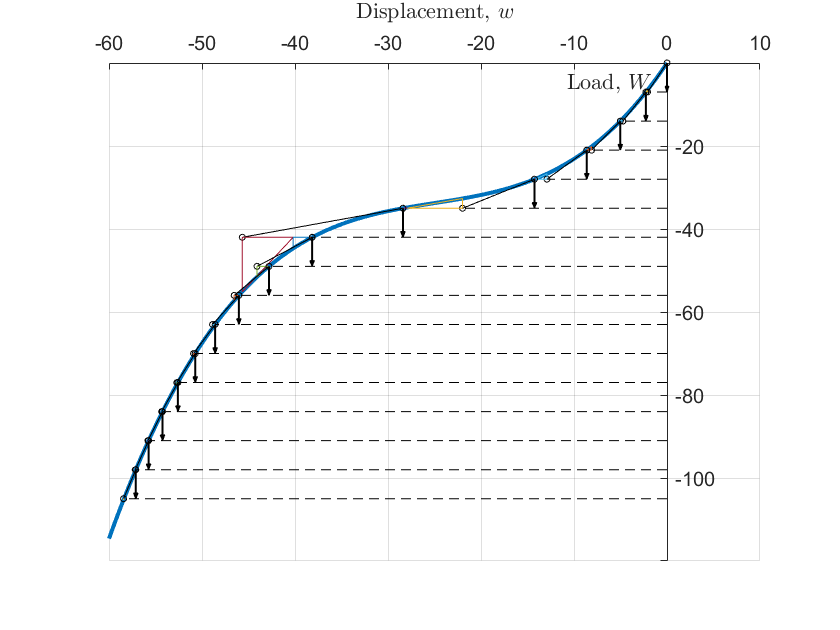
从上图可以看到,如果在非线性计算中
- 减小增量步的步长;
- 在每一个增量步进行迭代,使得残差小于某一个阈值
那么就能够得到相当不错的结果。