本征应变是不协调的应变
考虑如图所示的弹性体, 想象其中有一根细长杆, 在周围弹性介质的作用下发生变形, 其构型为 \(AP\). 将周围的弹性介质 \(D\) 移除之后, 细长杆恢复原来的形貌, 构型为 \(AP'\). 点 \(P\) 处不仅发生了位移, 并且如果考虑固连在点 \(P\) 处的坐标系, 在变形前后, 该坐标系会产生旋转. 接下来我们将通过公式推导得到刻画点 \(P\) 的位移与旋转.
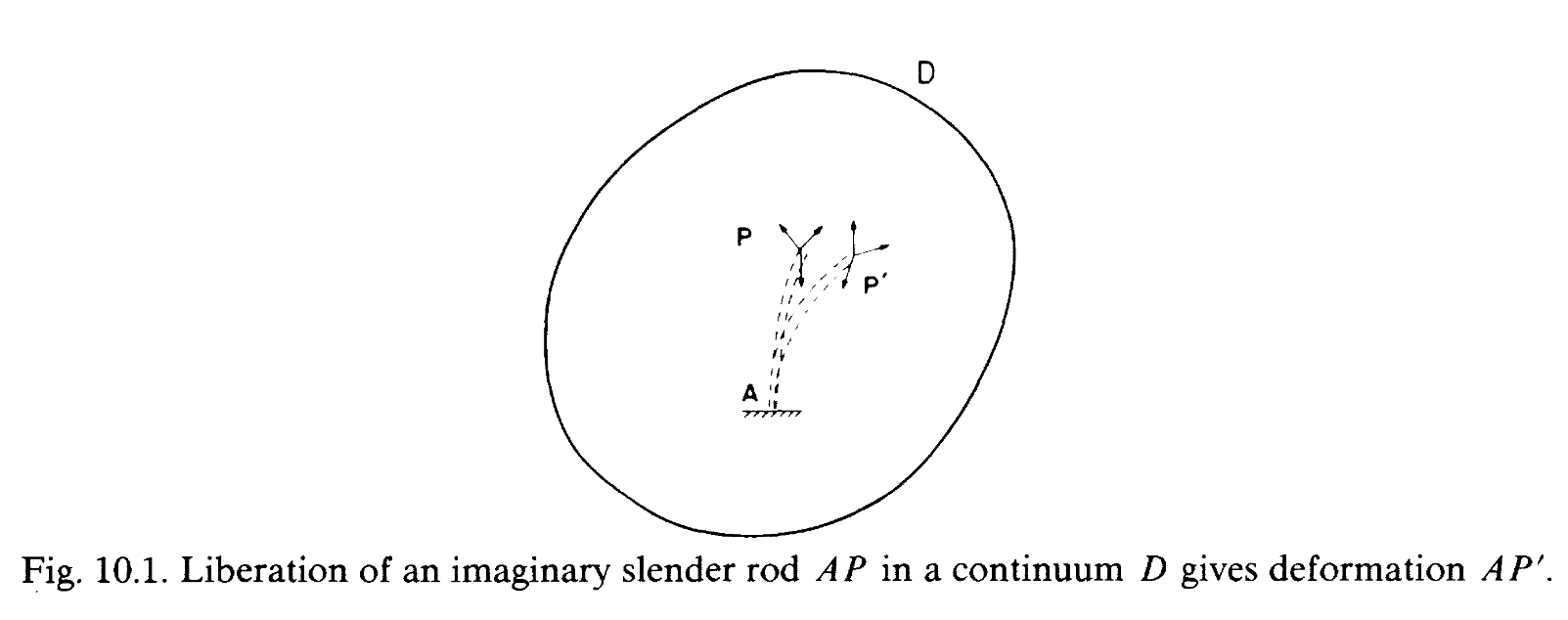
在进行推导之前, 我们需要再强调一下变形与自由构型的符号
- 变形体: \(AP\)
- 自由体: \(AP'\)
首先刻画的是细长杆中任意微元 \(\mathrm{d} s\) 的应变 \(e_{ij}\) 与端点位移 \(u_i\) 之间的关系. 因为是弹性应变, 所以有 \[ e_{ij} = -\frac{1}{2} \left( \frac{\delta u_i}{\delta x_j} + \frac{\delta u_j}{\delta x_i} \right) \tag{10.1} \] 需要强调的是, 上述应变公式是定义在曲线 \(AP\) 上的, 负号是因为我们考虑的是从变形体 \(AP\) 到自由体 \(AP'\) 的位移. \(\delta u_i\) 是沿着弧长微元 \(\mathrm{d} s = (\delta x_i \delta x_i)^{1/2}\) 位移的变化量. 类似的, 可以得到坐标系的旋转矩阵 \(\omega_{ij}\) 为 \[ \omega_{ij} = -\frac{1}{2} \left( \frac{\delta u_j}{\delta x_i} - \frac{\delta u_i}{\delta x_j} \right) \tag{10.1} \] 由此得到微元 \(\delta u_i\) 与 \(\delta x_i\) 之间的关系: \[ \delta u_i = -(e_{ij} - \omega_{ij}) \delta x_j \tag{10.2} \] 接下来推导旋度矩阵的微元 \(\delta \omega_{ij}\) 与 \(\delta x_i\) 之间的关系. 对应变 \(e_{ij}\) 求偏导数, 就得到 \[ \begin{aligned} e_{kj,i} = -\frac{1}{2} \left( \frac{\partial ~}{\partial x_i} \frac{\delta u_k}{\delta x_j} + \frac{\partial ~}{\partial x_i} \frac{\delta u_j}{\delta x_k} \right)\\ e_{ki,j} = -\frac{1}{2} \left( \frac{\partial ~}{\partial x_j} \frac{\delta u_k}{\delta x_i} + \frac{\partial ~}{\partial x_j} \frac{\delta u_i}{\delta x_k} \right) \end{aligned} \] 这怎么看都有点不太合理, 因为使用记号 \(\delta\) 是为了和偏导数进行区别, 但是为什么在这里又可以直接作用偏导数呢? 这不是我熟悉的语言
两式相减, 就得到 \[ e_{kj,i} - e_{ki,j} = -\frac{1}{2} \left( \frac{\partial ~}{\partial x_i} \frac{\delta u_j}{\delta x_k} - \frac{\partial ~}{\partial x_j} \frac{\delta u_i}{\delta x_k} \right) \] 这里用到了 (????) \[ \frac{\partial ~}{\partial x_i} \frac{\delta u_k}{\delta x_j} = \frac{\partial ~}{\partial x_j} \frac{\delta u_k}{\delta x_i} \] 两边乘 \(\delta x_k\), 再根据式 (2), 就得到 \[ \delta \omega_{ij} = (e_{kj,i} - e_{ki,j}) \delta x_k \tag{10.7$'$} \] 上式也可以用置换张量写作 \[ \delta \omega_{ij} = \epsilon_{hij} \epsilon_{hlm} e_{km,l} \delta x_k \tag{10.7} \] (\(\epsilon_{hij} \epsilon_{hlm} = \delta_{il}\delta_{jm} - \delta_{im}\delta_{jl}\))
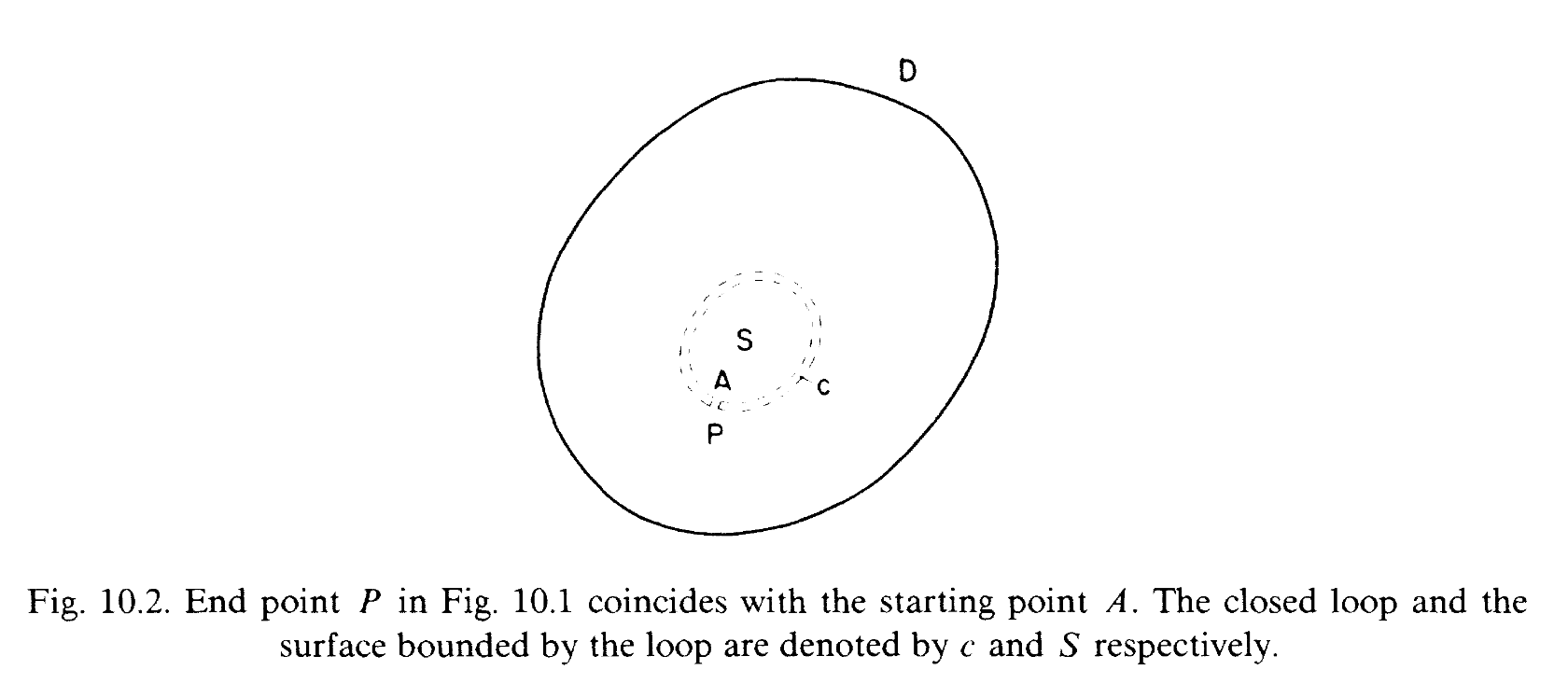
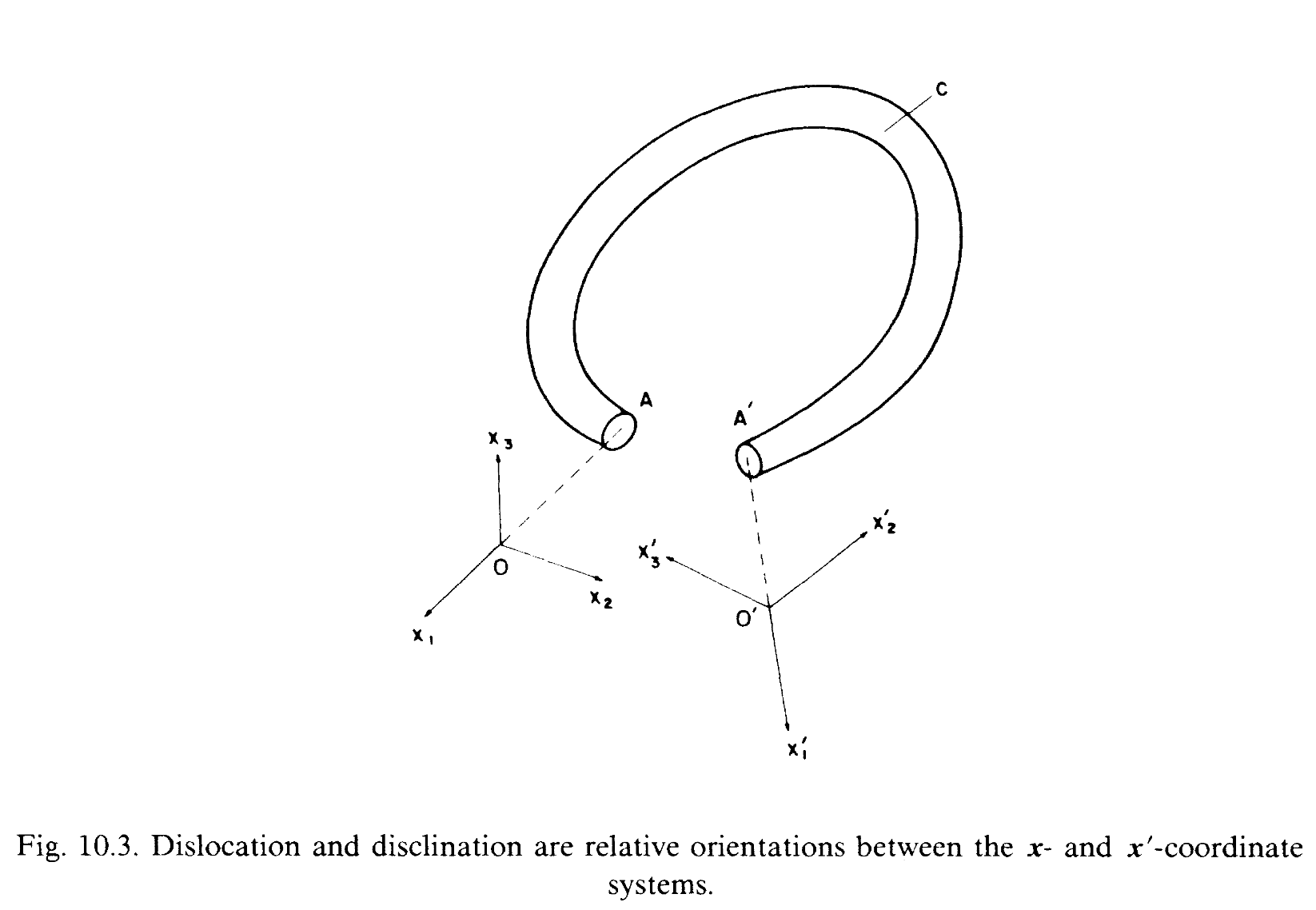
对式 (1) (2) 沿 \(AP\) 进行路径积分, 就得到 \(P\) 点处的位移和旋转矩阵: \[ \begin{aligned} u_i &= -\int_{A}^{P}(e_{ij} - \omega_{ij}) ~\mathrm{d} x_j \\ \omega_{ij} &= \int_{A}^{P} \epsilon_{hij} \epsilon_{hlm} e_{km,l} ~\mathrm{d} x_k \end{aligned} \] 以及初始条件 \[ u_i = 0, \quad \omega_{ij} = 0, \quad at ~~ A \] 如果考虑一个封闭的积分路径, 也即 \(A\) 与 \(P\) 重合, 并将环路末端点 \(P\) 的位移与旋转称为 dislocation 和 disclination, 那么, 根据上面的推导过程有 \[ \begin{aligned} u_i &= -\oint_{C}(e_{ij} - \omega_{ij}) ~\mathrm{d} x_j \\ \omega_{ij} &= \oint_{C} \epsilon_{hij} \epsilon_{hlm} e_{km,l} ~\mathrm{d} x_k \end{aligned} \] 环路曲线 \(C\) 又称为 Burgers 环路. (应该在第七章有过讨论)
应用 Stokes 定理: \[ \nabla \times v = \begin{vmatrix} e_1 & e_2 & e_3 \\ _{,1} & _{,2} & _{,3} \\ v_1 & v_2 & v_3 \end{vmatrix} = \epsilon_{ijk} e_k v_{j,i} \]
\[ \oint_{C} f \cdot \mathrm{d}x = \iint_S \nabla \times f \cdot n ~\mathrm{d}S \]
写成指标形式 \[ \oint_{C} f_i ~\mathrm{d}x_i = \iint_S \epsilon_{ijk} n_k f_{j,i} ~\mathrm{d}S \]
\[ \omega_{ij} = \iint_{S} \epsilon_{hij} \epsilon_{qpk} \epsilon_{hlm} e_{km,lp} n_q~\mathrm{d} S = \iint_{S} \epsilon_{hij} R_{hq} n_q ~\mathrm{d} S \tag{10.12} \]
\[ R_{qh} \triangleq \epsilon_{qpk} \epsilon_{hlm} e_{km,lp} \tag{10.13} \]
张量 \(R_{qh}\) 的对称性来自于 \(e_{km}\) 的指标 \(k \leftrightarrow m\) 对称, 以及求导次序 \(l \leftrightarrow p\) 可以交换. \[ u_i = -\oint_{C} (e_{ij} - \omega_{ij}) ~\mathrm{d} x_j \] 没办法直接应用 Stokes 公式转换到面 \(S\) 上的积分, 因为 \(\omega_{ij}\) 没办法直接求偏导数????对上式分部积分得到 \[ u_i = -\oint_{C} e_{ij} ~\mathrm{d} x_j + \oint_{C} \omega_{ij} ~\mathrm{d}x_j = -\oint_{C} e_{ij} ~\mathrm{d} x_j - \oint_{C} \delta\omega_{ij}x_j + \left.\omega_{ij}x_j\right|_{C} \] 以下得到的结果我没有办法理解, 这里只是将下一步的公式抄下来 \[ u_i = \underbrace{-\oint_{C} e_{ij} ~\mathrm{d} x_j}_{\equiv 0} - \oint_{C} x_j \epsilon_{hij} \epsilon_{hlm} e_{km,l} \mathrm{d} x_k + \underbrace{\left.\omega_{ij}x_j\right|_{C}}_{\equiv \omega_{ij}x_j^0} \] 整理一下得到 \[ u_i = \omega_{ij}x_j^0 - \iint_{S} x_j \epsilon_{hij} R_{hq} n_q ~\mathrm{d} S \tag{10.15} \]
式中的 \(\omega_{ij}x_j^0\) 还可以写作 \[ \omega_{ij}x_j^0 = x_i^{\prime}-O_i^{\prime} - (x_i - O_i) \triangleq (ox)_i^{\prime} - (ox)_i \] 这样就相对更容易理解式 (10.15), 移项得到 \[ (ox)_i + u_i - (ox)_i^{\prime} = - \iint_{S} x_j \epsilon_{hij} R_{hq} n_q ~\mathrm{d} S \] 上式左端项就等于固连在点 \(A\) 处的坐标系变形前后, 坐标系端点 \(oo'\) 之间的距离, 定义为 \[ \boxed{ \xi_i \triangleq - \iint_{S} x_j \epsilon_{hij} R_{hq} n_q ~\mathrm{d} S } \tag{10.17} \] 应变协调条件为 \[ \epsilon_{pki} \epsilon_{qlj} \varepsilon_{ij,kl} = 0 \\ \] 注意到张量 \(R_{hq}\) 的定义式 (10.13). 如果应变 \(e_{ij}\) 是协调的, 那么 \[ R_{hq} \equiv 0 \] 如果考虑应变 \(\varepsilon_{ij}\) 中还包含本征应变 \(\mu_{ij}\) \[ \varepsilon_{ij} = e_{ij} - \mu_{ij} \] 代入到式 (10.13) 中, 就得到由本征应变导致的不协调性 \[ R_{qh} = -\epsilon_{qpk} \epsilon_{hlm} \mu_{km,lp} \]